Една проста задачка, сложи един осцилоскоп на една от фазите на произволен безчетков ммотор и завърти мотора с някакви постояни обороти и постни клип да видим какво се вижда, променяй плавно оборотите и ми кажи какво става... това е което се следи от спида")
Това , ако искаш го направи ти ,може да е любопитно за публиката. На мен не ми се занимава
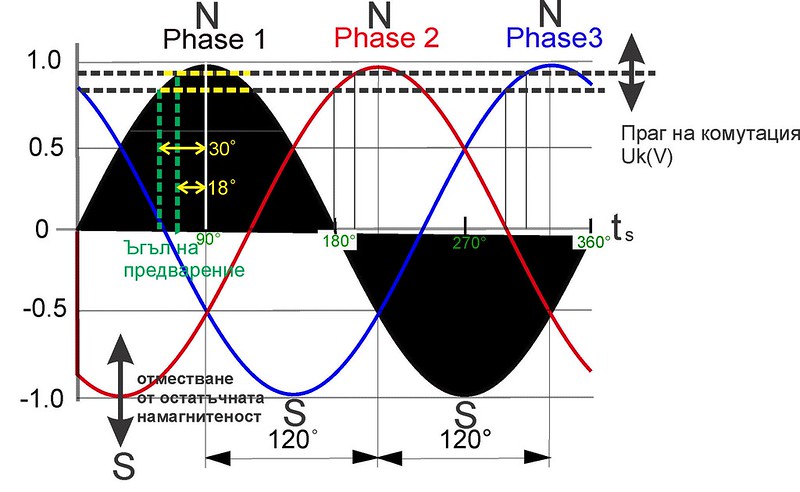
Какво е ,,периодично симетричен процес ,, и дали това не описва синусоида?Дали всяка вълнова форма не може да бъде описана със синусоида/и. Наличието на магнитопровод не променя закона по които се случват нещата а само променя техните стойности тоест ,,силата,, на полето във въздух ще е 3500пъти по слаба от това което ще се случи ако имаме магнитопровод от силициева ламарина от там по формулката по горе силата която ще деиства на ротора ще е 3500пъти по слаба от там въртящия момент 3500пъти по малък при един и същ ток ,от там нататък си вади изводите сам какво се случва когато нямаме въртящ момент... много лошо говори за теб ако не знаеш какво прави самоиндукцията в един постоянотоков двигател бил той четков или безчетков при комутация и какво прави взаимната индукция между фазите
Тука мога само да се изсмея по испански
Разлика в принципа на работа на спид за мултикоптер и спид за самолет няма!!!! За мултикоптерите се стремим само да се постигне по бърз трансвер на данни от полетния контролер до спида иначе системата за следене, на фазите ,и комутация е една и съща като алгоритъм, за да стане по бърз обмен на данни при мултикоптерите са премахнати системите за контрол на грешките на управляващия сигнал тоест са кастрирани от към глич филтър и запазване на последните валидни данни и тн обработки и се въвеждат нови протоколи за трансвер на данните но това не променя основния алгоритъм, системите за размагнитване , динамичен тайминг и динамична спирачка са добре дошли но те пак не променят основния алгоритъм а ги има и при някои по скъпи ,,самолетни,, или ,,кар,, спидове
Не говорим за принципа на работа, основната задача на мултикоптерните е да ускоряват моторите максимално бързо
Имам разработен собствен спид за мултиротори / самолети/ колички/колелета и летя с него вече близо 3 години , разгледай , може да ти стане интересно:
http://modelistika.com/showpost.php?p=331606&postcount=385
http://modelistika.com/showpost.php?p=331661&postcount=386
Естествено подържам всички нови протоколи до мултишот включително освен многократно по бързите I2C и сериен на 115200 бода и имам система която отчита загубата на синхронизация (грешката при четене от очакваната и а нормалното спадане на оборотите от очакваните спрямо подаденото задание)и индицира с червен светодиод
Минутка за реклама - няма лошо, евала за труда.
Паралела който правиш между четков и безчетков мотор малко не е коректен - има лекинка разлика в някои процеси.
Но да ги вземем за пример.
Четковия мотор го включваме директно към батерията и какво става ? Ами тръгва си самичък, колектора комутира в зададените моменти и не му пука за някаква си синхронизация. Защото си няма такава бедния. Има си само комутация, винаги в правилния момент. Без значение от обороти , товар, индукция, самоиндукциия, остатъчна намагнитеност или наситен магнитопровод. Затова тези мотори имат голям въртящ момент при старт и ниски обороти.
Към безчетковия мотор включваме спид контролер и към него батерията. За какво ни е спида? Ами някой трябва да комутира постяннотоковото напрежение на батерията към трите фази на мотора, понеже мотора си няма собствен комутатор. За да комутира в правилния момент, спида трябва да определи точното положение на ротора спрямо статора, без значение от обороти , товар, индукция, самоиндукциия, остатъчна намагнитеност или наситен магнитопровод.
СПИДА трябва да синхронизира положението на ротора спрямо статора и момента на комутация.
За загубата на синхронизация кой е виновен? Остатъчната намагнитеност на мотора или неспособноста на спида да определи положението на ротора спрямо статора?
Ако може по-накратко.

 Timing2
Timing2
